When optimising software, you have to know what is causing the software to run slower than you need it to run. We find in most cases, data movement is what really costs us the most. In the GPU, we find it labelled under fill rate, and when on CPU, we call it cache-misses. Data movement is where most of the energy goes when processing data, not in calculating solutions to functions, or from running an algorithm on the data, but actually the fulfillment of the request for the data in the first place. As this is most definitely true about our current architectures, we find that implicit or calculable information is much more useful than cached values or explicit state data.
If we start our game development by organising our data in normalised tables, we have many opportunities for optimisation. Starting with such a problem agnostic layout, we can pick and choose from tools we've created for other tasks, at worst elevating the solution to a template or a strategy, before applying it to both the old and new use cases.
To keep things simple, advice from multiple sources indicates that keeping your data as vectors has a lot of positive benefits. There are reasons to not use STL, including extended compile and link times, as well as issues with memory allocations. Whether you use std::vector, or roll your own dynamicly sized array, it is a good starting place for any future optimisations. Most of the processing you will do will be transforming one array into another, or modifying a table in place. In both these cases, a simple array will suffice for most tasks.
For the benefit of your cache, structs of arrays can be more cache friendly if the data is not related. It's important to remember that this is only true when the data is not meant to be accessed all at once, as one advocate of the data-oriented design movement assumed that structures of arrays were intrinsically cache friendly, then put the x,y, and z coordinates in separate arrays of floats. The reason that this is not cache friendly should be relatively easy to spot. If you need to access the x,y, or z of an element in an array, then you more than likely need to access the other two axes as well. This means that for every element he would have been loading three cache-lines of float data, not one. This is why it is important to think about where the data is coming from, how it is related, and how it will be used. Data-oriented design is not just a set of simple rules to convert from one style to another.
If you use dynamic arrays, and you need to delete elements from them, and these
tables refer to each other through some IDs, then you may need a way to splice
the tables together in order to process them. If the tables are sorted by the
same value, then it can be written out as a simple merge operation, such as in
Listing ![]() .
.
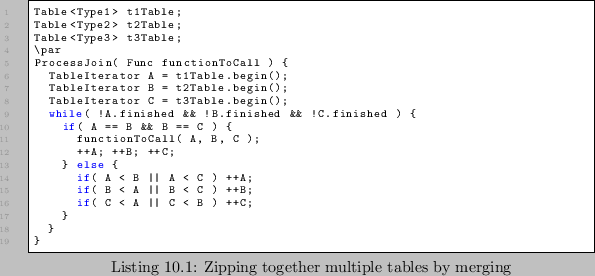
This works as long as the == operator knows about the table types and can find
the specific column to check against, and as long as the tables are sorted
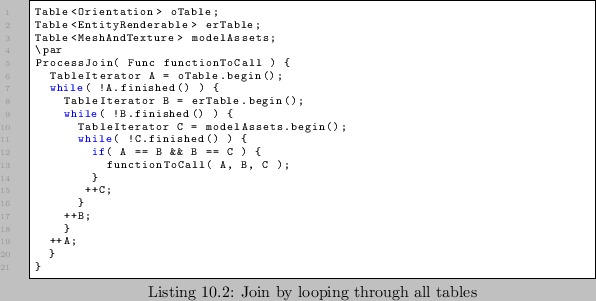
based on this same column. But what about the case where the tables are zipped
together without being the sorted by the same columns? For example, if you have
a lot of entities that refer to a modelID, and you have a lot of mesh-texture
combinations that refer to the same modelID, then you will likely need to zip
together the matching rows for the orientation of the entity, the modelID in
the entity render data, and the mesh and texture combinations in the models.
The simplest way to program a solution to this is to loop through each table in
turn looking for matches such as in Listing ![]() .
.
Another thing you have to learn about when working with data that is joined on
different columns is the use of join strategies. In databases, a join strategy
is used to reduce the total number of operations when querying across multiple
tables. When joining tables on a column (or key made up of multiple columns),
you have a number of choices about how you approach the problem. In our trivial
coded attempt you can see we simply iterate over the whole table for each table
involved in the join, which ends up being O(![]() ) or O(
) or O(![]() ) for rougly same
size tables. This is no good for large tables, but for small ones it's fine.
You have to know your data to decide whether your tables are
big10.1 or not. If
your tables are too big to use such a trivial join, then you will need an
alternative strategy.
) for rougly same
size tables. This is no good for large tables, but for small ones it's fine.
You have to know your data to decide whether your tables are
big10.1 or not. If
your tables are too big to use such a trivial join, then you will need an
alternative strategy.
You can join by iteration, or you can join by lookup10.2, or you can even join once and keep a join cache around.
The first thing could do is use the ability to have tables sorted in multiple ways at the same time. Though this seems impossible, it's perfectly feasible to add auxilary data that will allow for traversal of a table in a different order. We do this the same way databases allow for any number of indexes into a table. Each index is created and kept up to date as the table is modified. In our case, we implement each index the way we need to. Maybe some tables are written to in bursts, and an insertion sort would be slow, it might be better to sort on first read. In other cases, the sorting might be better done on write, as the writes are infrequent, or always interleaved with reads.
Concatenation trees provide a quick way to traverse a list. Conc-trees usually are only minimally slower than a linear array due to the nature of the structure. A conc-tree is a high level structure that points to a low level structure, and many elements can pass through a process before the next leaf needs to be loaded. The code for a conc-tree doesn't remain in memory all the time like other list handling code, as the list offloads to an array iteration whenever it is able. This alone means that sparse conc-trees end up spending little time in their own code, and offer the benefit of not having to rebuild when an element goes missing from the middle of the array.
In addition to using concatenation trees to provide a standard iterator for a constantly modified data store, it can also be used as a way of storing multiple views into data. For example, perhaps there is a set of tables that are all the same data, and they all need to be processed, but they are stored as different tables for some reason, such as what team they are on. Using the same conc-tree code, they can be iterated as a full collection with any code that accepts a conc-tree instead of an array iterator.
Modifying a class can be difficult, especially at runtime when you can't affect the offsets in running code without at least stopping the process and updating the executable. Adding new elements to a class can be very useful, and in languages that allow it, such as Ruby and Python, and even Javascript, it can be used as a substitute for virtual functions and compositing. In other languages we can add new functions, new data, and use them at runtime. In C++, we cannot change existing classes, unless they are defined by some other mechanism than the compile time structure syntax. We can add elements if we define a class by its schema, a data driven representation of the elements in the class. The benefit of this is that schema can include more, or less, than normal given a new context. For example, in the case of some merging where the merging happens on two different axes, there could be two different schema representing the same class. The indexes would be different. One schema could include both indexes, with which it would build up an combination table that included the first two tables merged, by the first index, but maintainingg the same ordering so that when merging the merged table with the third table to be merged, the second index can be used to maintain efficient combination.
A, B, C B has index(AB), and index(BC) merge A,B (by index(AB)) AB, C merge AB, C (by index(BC)) ABC
Taking the concept of schemas another step, a static schema definition can allow for a different approach to iterators. Instead of iterating over a container, giving access to an element, a schema iterator can become an accessor for a set of tables, meaning the merging work can be done during iteration, generating a context upon which the transform operates. This would benefit large, complex merges that do little with the data, as there would be less memory usage creating temporary tables. It would not benefit complex transforms as it would reduce the likelihood that the next set of data is in memory ready for the next cycle.
For large jobs, a smarter iterator will help in task stealing, the concept of taking work away from a process that is already running in order to finish the job faster. A scheduler, or job management system, built for such situations, would monitor how tasks were progressing and split remaining work amongst any idle processors. Sometimes this will happen because other processes took less time to finish than expected, sometimes because a single task just takes longer than expected. Whatever the reason, a transform based design makes task stealing much simpler than the standard sequential model, and provides a mechanism by which many tasks can be made significantly more parallel.
Another aspect of transforms is the separation of what from how, the separation of the loading of data to transform from the code that performs the operations on the data. In some languages, introducing map and reduce is part of the basic syllabus, in c++, not so much. This is probably because lists aren't part of the base language, and without that, it's hard to introduce powerful tools that require an understanding of them. These tools, map and reduce, can be the basis of a purely transform and flow driven program. Turning a large set of data into a single result sounds eminently serial, however, as long as one of the steps, the reduce step, is either associative, or commutative, then you can reduce in parallel for a significant portion of the reduction.
A simple reduce, one made to create a final total from a mapping that produces values of zero or one for all matching elements, can be processed as a less and less parallel tree of reductions. In the first step, all reductions produce the total of all odd-even pairs of elements, and produce a new list that goes through the same process. This list reduction continues until there is only one item left remaining. Of course this particular reduction is of very little use, as each reduction is so trivial, you'd be better off assigning an Nth of the workload to each of the N cores and doing one final summing. A more complex, but equally useful reduction would be the concatenation of a chain of matrices. Matrices are associative even if they are not commutative, and as such, the chain can be reduced in parallel the same way building the total worked. By maintainingg the order during reduction you can apply parallel processing to many things that would normally seem serial as long as they are associative in the reduce step. Not only matrix concatenation, but also products of floating point values such as colour modulation by multiple causes such as light, diffuse, or gameplay related tinting. Building text strings can be associative, as can be building lists and of course conc-trees themselves.
In collision detection, there is often a broad-phase step which can massively reduce the number of potential collisions we check against. When ray casting, it's often useful to find the potential intersection via an octree, bsp, or other single query accelerator. When running path finding, sometimes it's useful to look up local nodes to help choose a starting node for your journey.
All spatial data-stores accelerate queries by letting them do less. They are based on some spatial criteria and return a reduced set that is shorter and thus less expensive to transform into new data.
Existing libraries that support spatial partitioning have to try to work with arbitrary structures, but because all our data is already organised by table, writing adaptors for any possible table layout is simple. Writing generic algorithms becomes very easy without any of the side effects normally associated with writing code that is used in multiple places. Using the table based approach, because of its intention agnosticism (that is, the spatial system has no idea it's being used on data that doesn't technically belong in space), we can use spatial partitioning algorithms in unexpected places, such as assigning audio channels by not only their distance from the listener, but also their volume and importance. Making a 5 dimensional spatial partitioning system, or an N dimensional one, would only have to be written once, have unit tests written once, before it could be used and trusted to do some very strange things. Spatially partitioning by the quest progress for tasks to do seems a little overkill, but getting the set of all nearby interesting entities by their location, threat, and reward, seems like something an AI might consider useful.
When optimising Objectoriented code, it's quite common to find local caches of calculations done hidden in mutable member variables. One trick found in most updating hierarchies is the dirty bit, the flag that says whether the child or parent members of a tree imply that this object needs updating. When traversing the hierarchy, this dirty bit causes branching based on data that has only just loaded, usually meaning there is no chance to guess the outcome and thus in most cases, causes a pipeline flush and an instruction lookup.
If your calculation is expensive, then you might not want to go the route that renderer engines now use. In render engines, it's cheaper to do every scene matrix concatenation every frame than it is only doing the ones necessary and figuring out if they are.
For example, in the /emphGCAP 2009 - Pitfalls of Object Oriented Programming presentation by Tony Albrecht in the early slides he declares that checking a dirty flag is less useful than not checking it as if it does fail (the case where the object is not dirty) the calculation that would have taken 12 cycles is dwarfed by the cost of a branch misprediction (23-24 cycles).
If your calculation is expensive, you don't want to bog down the game with a large number of checks to see if the value needs updating. This is the point at which existence-based-processing comes into its own again as existence the dirty table implies that it needs updating, and as a dirty element is updated it can be pushing new dirty elements onto the end of the table, even prefetching if it can improve bandwidth.
When you normalise your data you reduce the chance of another multifaceted problem of object-oriented development. C++'s implementation of objects forces unrelated data to share cache-lines.
Objects collect their data by the class, but many objects, by design, contain more than one role's worth of data. This is partially because object-oriented development doesn't naturally allow for objects to be recomposed based on their role in a transaction, and partially because C++ needed to provide a method by which you could have object-oriented programming while keeping the system level memory allocations overloadable in a simple way. Most classes contain more than just the bare minimum, partially because of inheritance, and partially because of the many contexts in which an object can play a part. Unless you have very carefully laid out a class, many operations that require only a small amount of information from the class, will load a lot of unnecessary data into the cache in order to do so. Only using a very small amount of the loaded data is one of the most common sins of the object-oriented programmer.
Every virtual call loads in the cache-line that contains the virtual-table pointer of the instance. If the function doesn't use any of the class's early data, then that will be cacheline usage in the region of only 4%. That's a memory throughput waste, and cannot be recovered without rethinking how you dispatch your functions. After the function has loaded, the program has to load the data it wants to work on, which can be scattered across the memory allocated for the class too. Sometimes you might organise the data so that the function is accessing contiguous blocks of useful information, but someone going in and adding new data at the top of the class can shift all the data that was previously on one cache-line, into a position where it is split over two, or worse, make the whole class unaligned causing virtually random timing properties on every call. This could be even worse if what they have added is a precondition that loads data from an unrelated area of memory, in which case it would require that the load finished before it even got to the pipeline flush if it failed the branch into loading the function body and the definitely necessary transformable data.
A general approach with the table formatted data is to preparse the table to produce a job list. There would be one job list per transform type identified by the data if it was to emulate a virtual call. Then, once built, transform using these new job tables to drive the process. For each transform type , run the transform over all the jobs in the job queue built for this transform. This is much faster as the function used to transform the data is no longer coming from a virtual lookup, but instead is implied by which table is being processed, meaning no instruction cache misses after the first call to the transform function, and not loading the transform if there are zero entries.
Another benefit is that the required data can be reorganised now that it's obvious what data is necessary. This leads to simple to optimised data structures compared to an opaque class that to some extent, pretends that the underlying memory configuration is unimportant and encapsulated. This can help with pre-fetching and write combining to give near optimal performance without any low level coding.
Throughout the techniques so far, there's been an implied table structure to the data. Each row being a struct, or each table being a row of columns of data, depending on the need of the transforms. When we normally do stream processing, for example, with shaders, we normally use fixed size buffers. Most work done with stream processing has this same limitation, we tend to have a fixed number of elements for both sides. However, we saw that conc-trees solve the problem of mapping from one size input to another size output, and that it works by concatenating the output data into a cache-oblivious structure. This structure is very general purpose and could be a basis for preliminary work with map-reduce programming for your game, but there are cases where much better structures exist.
For filtering, that is where the input is known to be superset of the output, then there can be a strong case for an annealing structure. Like the conc-trees, each transform thread has its own output, but instead of concatenating, the reduce step would first generate a total and a start position for each reduce entry and then process the list of reduces onto the final contiguous memory.
If the filtering was a stage in a radix sort or something that uses a similar
histogram for generating offsets, then a parallel prefix sum would reduce the
time to generate the offsets. A prefix sum is the running total of a list of
values. The radix sort output histogram is a great example because the bucket
counts indicate the starting points through the sum of all histogram buckets
that come prior.
![]() . This is easy to generate in
serial form, but in parallel we have to consider the minimum required
operations to produce the final result. In this case we can remember that the
longest chain will be the value of the last offset, which is a sum of all the
elements. This is normally optimised by summing in a binary tree fashion.
Dividing and conquering: first summing all odd numbered slots with all even
numbered slots, then doing the same, but for only the outputs of the previous
stage.
. This is easy to generate in
serial form, but in parallel we have to consider the minimum required
operations to produce the final result. In this case we can remember that the
longest chain will be the value of the last offset, which is a sum of all the
elements. This is normally optimised by summing in a binary tree fashion.
Dividing and conquering: first summing all odd numbered slots with all even
numbered slots, then doing the same, but for only the outputs of the previous
stage.
![$\displaystyle \xymatrix{
A \ar[d] \ar[dr] & B \ar[d] & C \ar[d] \ar[dr] & D \a...
... \ar[d] & ab \ar[d] \ar[drr] & c \ar[d] & cd \ar[d] \\
a & ab & abc & abcd }
$](img38.png)
Then once you have the last element, backfill all the other elements you didn't finish on your way to making the last element. When you come to write this in code, you will find that these back filled values can be done in parallel while making the longest chain. They have no dependency on the final value so can be given over to another process, or managed by some clever use of SIMD.
![$\displaystyle \xymatrix{
a \ar[d] & ab \ar[d] \ar[dr] & c \ar[d] & abcd \ar[d] \\
a & ab & abc & abcd }
$](img39.png)
Also, for cases where the entity count can rise and fall, you need a way of adding and deleting without causing any hiccups. For this, if you intend to transform your data in place, you need to handle the case where one thread can be reading and using the data that you're deleting. To do this in a system where objects' existence was based on their memory being allocated, it would be very hard to delete objects that were being referenced by other transforms. You could use smart pointers, but in a multi-threaded environment, smart pointers cost a mutex to be thread safe for every reference and dereference. This is a high cost to pay, so how do we avoid it?
Don't ever delete.
Deletion is for wimps. If you are deleting in a system that is constantly changing, then you would normally use pools anyway. By explicitly not deleting, but doing something else instead, you change the way all code accesses data. You change what the data represents. If you need an entity to exist, such as a CarDriverAI, then it can stack up on your table of CarDriverAIs while it's in use, but the moment it's not in use, it won't get deleted, but instead marked as not used. This is not the same as deleting, because you're saying that the entity is still valid, won't crash your transform, but can be skipped as if it were not there until you get around to overwriting it with the latest request for a CarDriverAI. Keeping dead entities around is as cheap as keeping pools for your components.
Condition tables normally operate as arrays of condition flag bit fields. The flags are the collected results of conditions on the data. But, if the bit fields are organised by decision rather than by row, then you can call in only the necessary conditions into different decision transforms.
If the bits are organised by condition, then you can run a short transform on
the whole collection of condition bits to create a new, simpler list of whether
or nots. For example, you may have conditions for decisions that you can map to
an alphabet of a-m, but only need some for making a decision. Imagine you need
to be sure thatk a,d,f,g are all false, but e,j,k need to all be true. Given
this logic, you can build a new condition, let's say q, that equals
![]() which can then be used
immediately as a job list.
which can then be used
immediately as a job list.
Organising the bits this way could be easier to parallelize as a transform that produces a condition stream would be in contention with other processes if they shared memory10.3. The benefit to row based conditions comes when the conditions change infrequently, and the number of things looking at the conditions to make decisions is small enough that they all fit in a single platform specific type, such as a 32bit or 64bit unsigned int. In that case, there would be no benefit in reducing the original contention when generating the condition bits, and because the number of views, or contexts about the conditions is low, then there is little to no benefit from splitting the processing so much.
If you have an entity that needs to reload when their ammo drops to zero, and they need to consider reloading their weapon if there is a lull in the action, then, even though both those conditions are based on ammo, the decision transforms are not based on the same condition. If the condition table has been generated as arrays of condition bitfields with each bit representing one row's state with respect to that condition, then you can halve the bandwidth to the check for definite-reload transform, and halve the bandwidth for the reload-consideration check. There will be one stream of bits for the condition of ammo equal to zero, and another stream for ammo less than max. There's no reason to read both, so we don't.
What we have here is another case of deciding whether to go with structures of arrays, or sticking with an array of structures. If we access the data from a few different contexts, then a structure of arrays trumps it. If we only have one context for using the conditions, then the array of structures, or in this case, array of masks, wins out. But remember to profile as any advice is only advice and only measuring can really provide proof, or evidence that assumptions are wrong.
Sometimes, normalisation can mean you need to join tables together to create the right situation for a query. Unlike RDBMS queries, we can organise our queries much more carefully and use the algorithm from merge sort to help us zip together two tables. As an alternative, we don't have to output to a table, it could be a pass through transform that takes more than one table and generates a new stream into another transform. For example, per entityRenderable, join with entityPosition by entityID, to transform with AddRenderCall( Renderable, Position )
Apart from finite state machines there are some other common forms of data driven coding practices, some of which are not very obvious, such as callbacks, and some of which are very much so, such as scripting. In both these cases, data causing the flow of code to change will cause the same kind of cache and pipe-line problems as seen in virtual calls and finite state machines.
Callbacks can be made safer by using triggers from event subscription tables. Rather than have a callback that fires off when a job is done, have an event table for done jobs so that callbacks can be called once the whole run is finished. For example, if a scoring system has a callback from "badGuyDies", then in an Object-oriented message watcher you would have the scorer increment its internal score whenever it received the message that a badGuyDies. Instead run each of the callbacks in the callback table once the whole set of badguys has been checked for death. If you do that, and execute every time all the badGuys have had their tick, then you can add points once for all badGuys killed. That means one read for the internal state, and one write. Much better than multiple reads and writes accumulating a final score.
For scripting, if you have scripts that run over multiple entities, consider how the graphics kernels operate with branches, sometimes using predication and doing both sides of a branch before selecting a solution. This would allow you to reduce the number of branches caused merely by interpreting the script on demand. If you go one step further an actually build SIMD into the scripting core, then you might find that you can run script for a very large number of entities compared to traditional per entity serial scripting. If your SIMD operations operate over the whole collection of entities, then you will pay almost no price for script interpretation10.4.